GSL.hpp File Reference
#include <memory>#include <ccgsl/exception.hpp>#include <ccgsl/vector.hpp>#include <ccgsl/matrix.hpp>#include <ccgsl/rng.hpp>#include <ccgsl/linalg.hpp>
Include dependency graph for GSL.hpp:

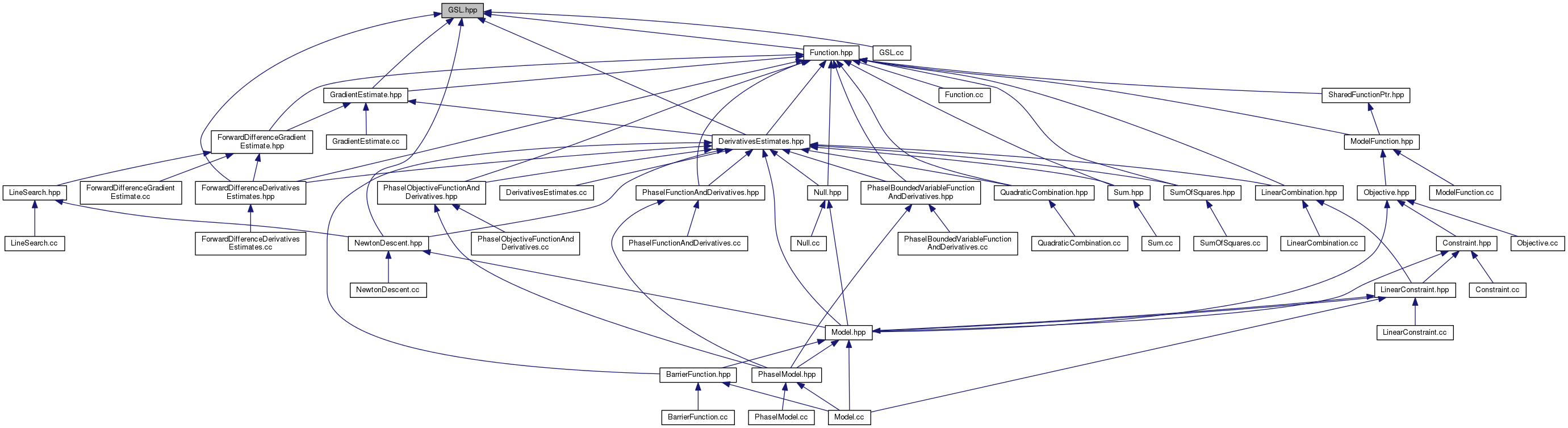
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| ipo | |
| This namespace holds all the interior-point optimisation classes. | |
| ipo::detail | |
| Namespace for classes that handle details of interior-point optimisation that are not ordinarily accessed directly to set up and solve a convex optimisation problem. | |
Functions | |
| std::tuple< gsl::matrix, double > | ipo::detail::modifiedCholeskyDecomp (gsl::matrix const &matrix, double maxoffl) |
| Modified in-place Cholesky decomposition using the method of Gill, Murray and Wright (1981) to deal with cases where matrix is not positive definite. More... | |
| gsl::matrix | ipo::detail::modelHessian (gsl::matrix &matrix) |
| Find a Cholesky decomposition (both upper and lower triangles returned in matrix) of a matrix + mu * I, where matrix is a Hessian (assumed symmetric) matrix and mu is chosen to ensure that matrix + mu * I is safely poitive definite and is zero if matrix is already safely positive definite. More... | |
