Model.cc File Reference
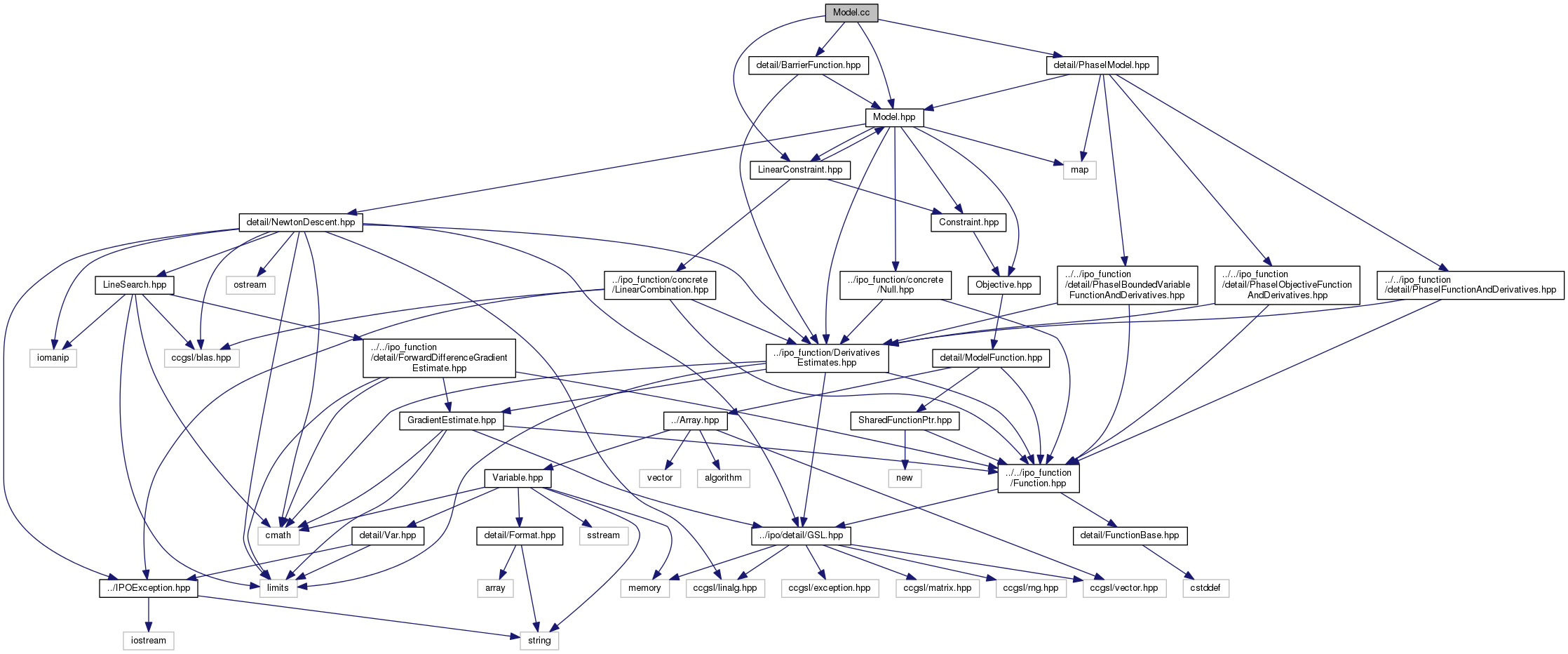
#include "Model.hpp"#include "detail/BarrierFunction.hpp"#include "detail/PhaseIModel.hpp"#include "LinearConstraint.hpp"
Include dependency graph for Model.cc:
|
Interior-point-optimisation
1.0-1
Interior-pointoptimisationlibrary
|
#include "Model.hpp"#include "detail/BarrierFunction.hpp"#include "detail/PhaseIModel.hpp"#include "LinearConstraint.hpp" 1.8.8
1.8.8